September 14, 2016
The Derivative Component in PID Tuning
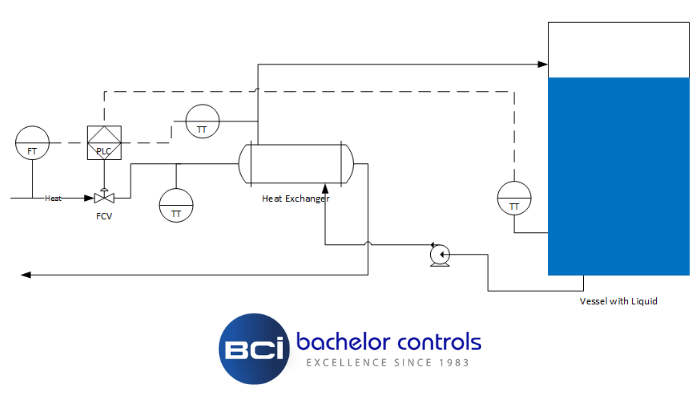
The Derivative Component in PID TUNING IntroductionThis paper is intended to stimulate thought regarding how we think about PID tuning when it comes to the use of the derivative component. PID Tuning Challenges Why?So what is it that derivative is supposed to help accomplish? Most…